电机基本参数包括相电阻Rs、极对数n、定子电感Ls和反电动势Ke。Rs通过测量任意两相电阻并除以2得到;n通过给两相通电并转动转子,记录转子稳定位置个数确定;Ls通过电桥测试任意两相电感并除以2获得;Ke需在电机稳定转速下使用示波器测量三相电压,计算波峰与波谷间的伏值。参数辨识算法使电机控制器具备测量功能,后续将详细说明。
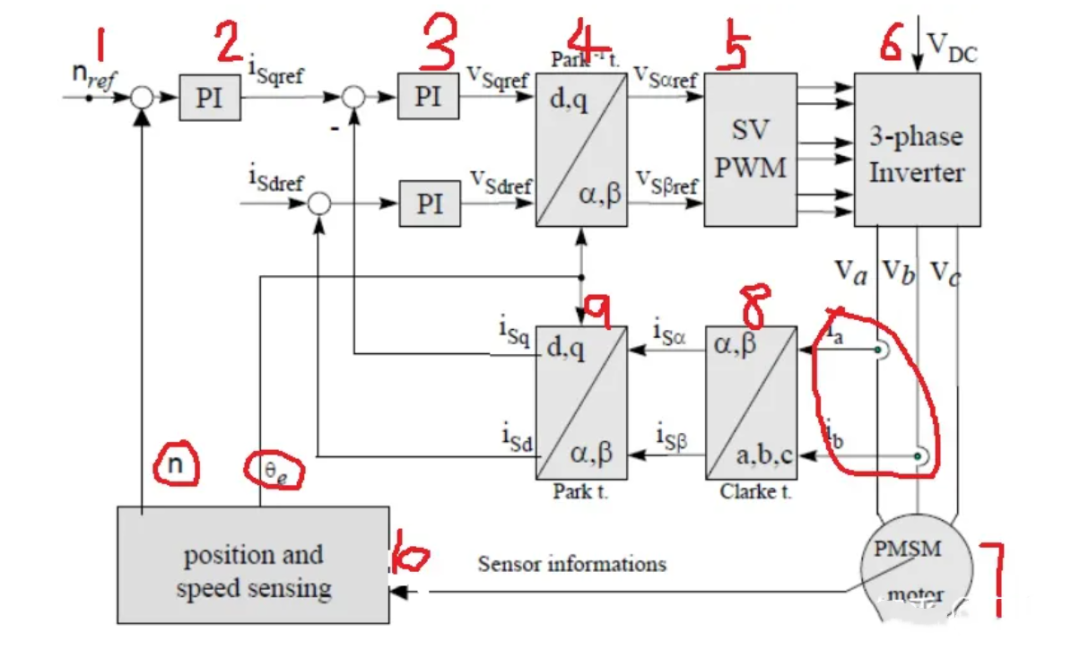
当我们手中拿到一个电机时,如果想将他驯的服服帖帖,就需要知道他的基本参数。这些基本参数会在下图中的第2、3、6、10中用到。至于为什么会用到这些参数,等咱们开始扯公式的时候会详细说明。不得不说,*讨厌公式,但是又离不开公式。咱这篇讨论的是电机的星型接法昂。
Rs 相电阻
这个参数测量比较简单,用手中的万用表,量任意两个相之间的电阻,然后除以2,就可以得到电机的相电阻Rs。
极对数n
这个测量需要用到带有限流功能的稳压电源。给你手中电机的三相接线其中的任意两相通电。需要限制的电流为1A,需要通入的电压V=1*Rs(上面测量的参数)。然后用手转动转子,会感觉到阻力。如果阻力不明显可以继续增大电压至有明显的转动阻力。当电机转动一圈时,转子稳定的位置个数,就是电机的极对数。
Ls定子电感
这个需要使用到电桥进行测试定子任意两相之间的电感,得到的数值除以2就可以得到Ls。
反电动势Ke
对于FOC的控制程序,涉及到电机的这几个参数就可以了,如果需要matlab仿真还需要一个电机的反电动势。这个参数测量稍微麻烦一些。需要让电机稳定在n转,然后等到电机转数稳定后使用示波器测量三相的电压,如下图所示:
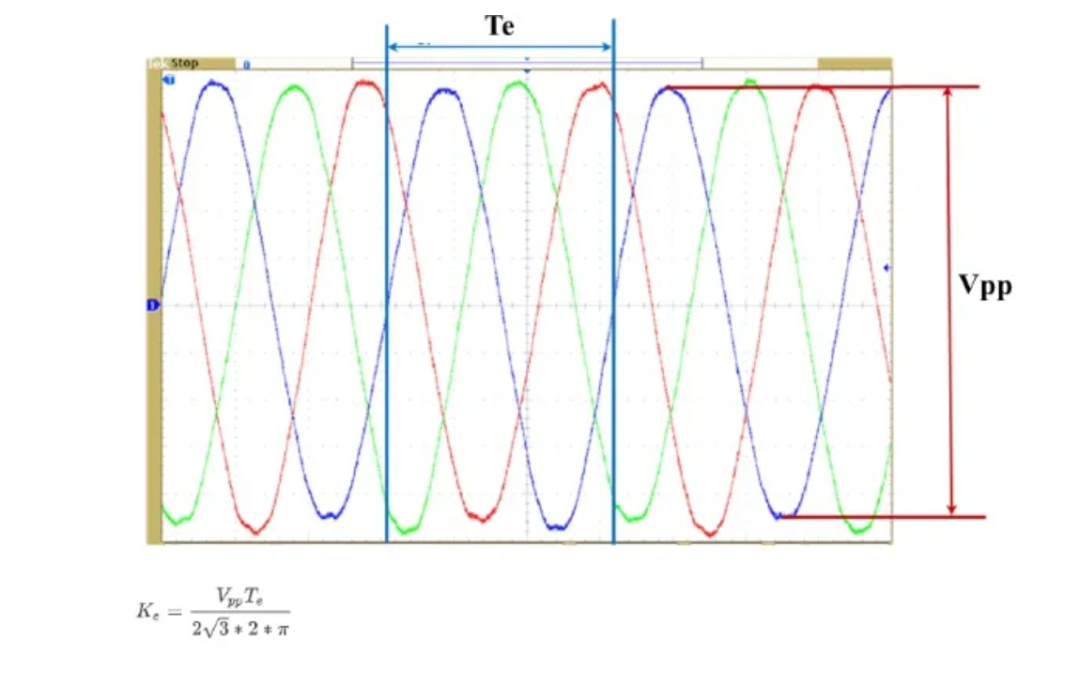
上式中Vpp是波形中波峰与波谷之间的伏值。
其中Te=60/(n*p),n为机械转速单位 rpm,p为极对数。如果电机维持1000转,n就等于1000。
现在有个算法叫做电机的参数辨识,这个就是使用算法让电机控制器具有万用表或者是电桥的测试功能,然后就是测量及计算的问题,后面会对照相关公式对参数辨识进行详细说明。